
01
Clinical Motivation
Addressing the Healthcare Shortage
The medical field is facing an expected shortage of 2.3 million trained health workers in Europe by 2030. To mitigate this, robotic assistants must be developed to handle repetitive and risky tasks in the Operating Room.
Occupational Risks: Scrub nurses face high-stress environments involving repetitive motions, radiation exposure, and cutting hazards.
Beyond Rule-Based Systems: Traditional robots (like Moxi) lack the flexibility needed to adapt to dynamic surgical procedures without constant expert reprogramming.
The AI Need: Imitation Learning offers a pathway to train robots directly from human demonstrations, granting flexibility for complex medical tasks.
02
Hardware & Protocol
Bimanual Data Collection Platform
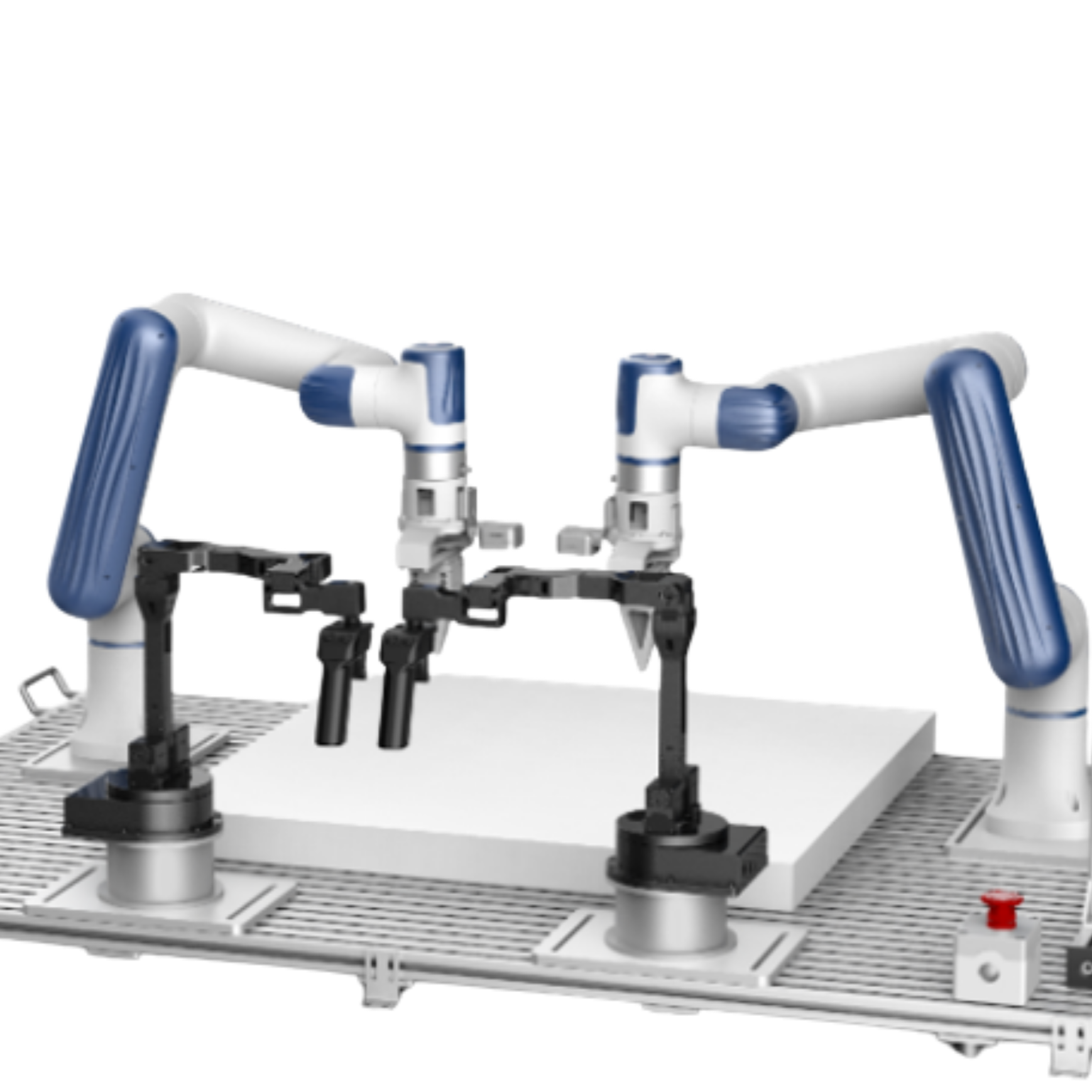
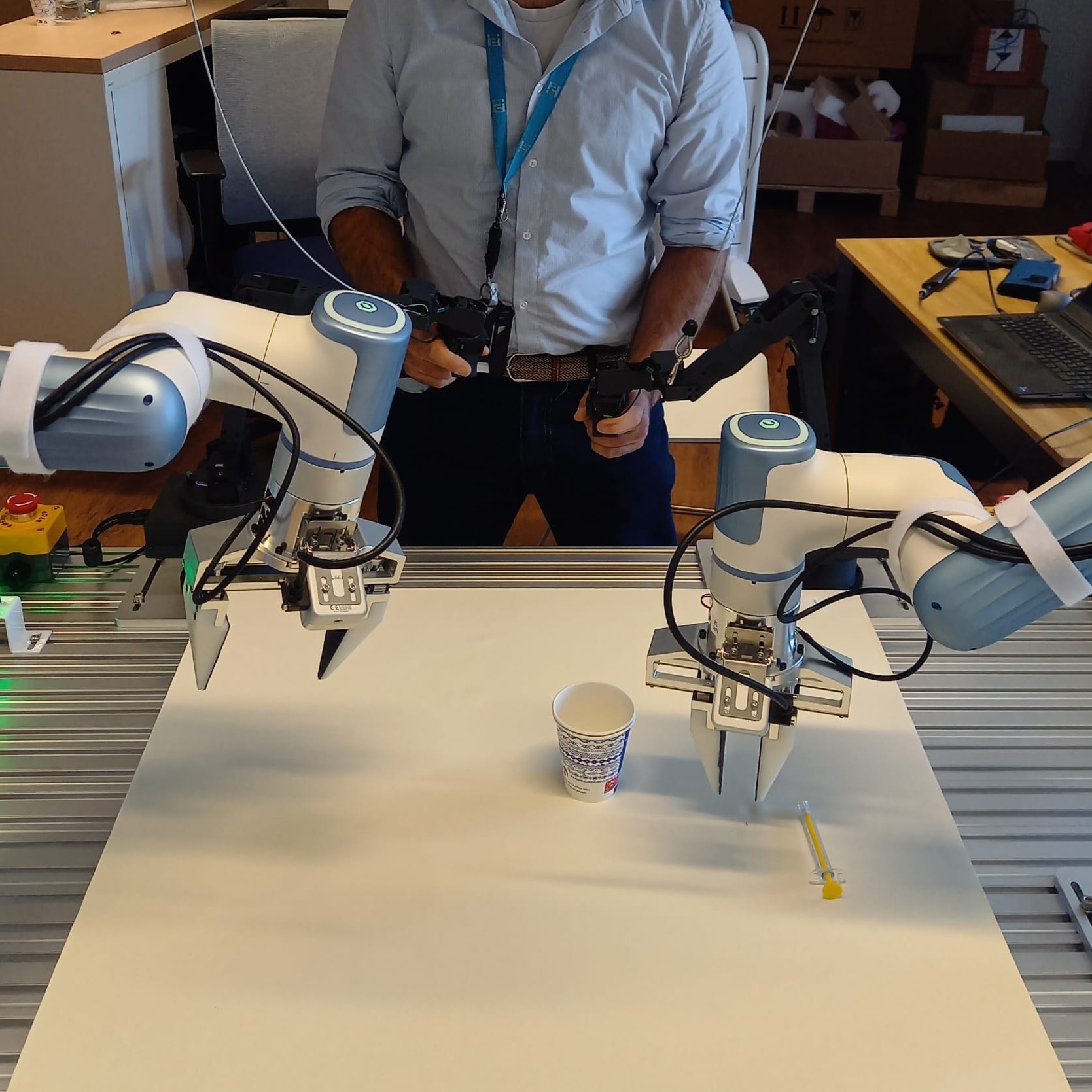
To train advanced AI policies, I set up a leader-follower telemanipulation architecture using the Dobot X-Trainer to gather multimodal, high-quality human demonstrations from clinical experts.
Configured a 14 Degrees of Freedom (DoF) bimanual platform.
Collected synchronous multimodal data: Joint angles and 3x RGB-Depth camera feeds.
Designed tasks (sterile pack opening, instrument handover) to extract realistic clinical trajectories.
03
Policy Testing & Limitations
Evaluating SoTA Policy Limits
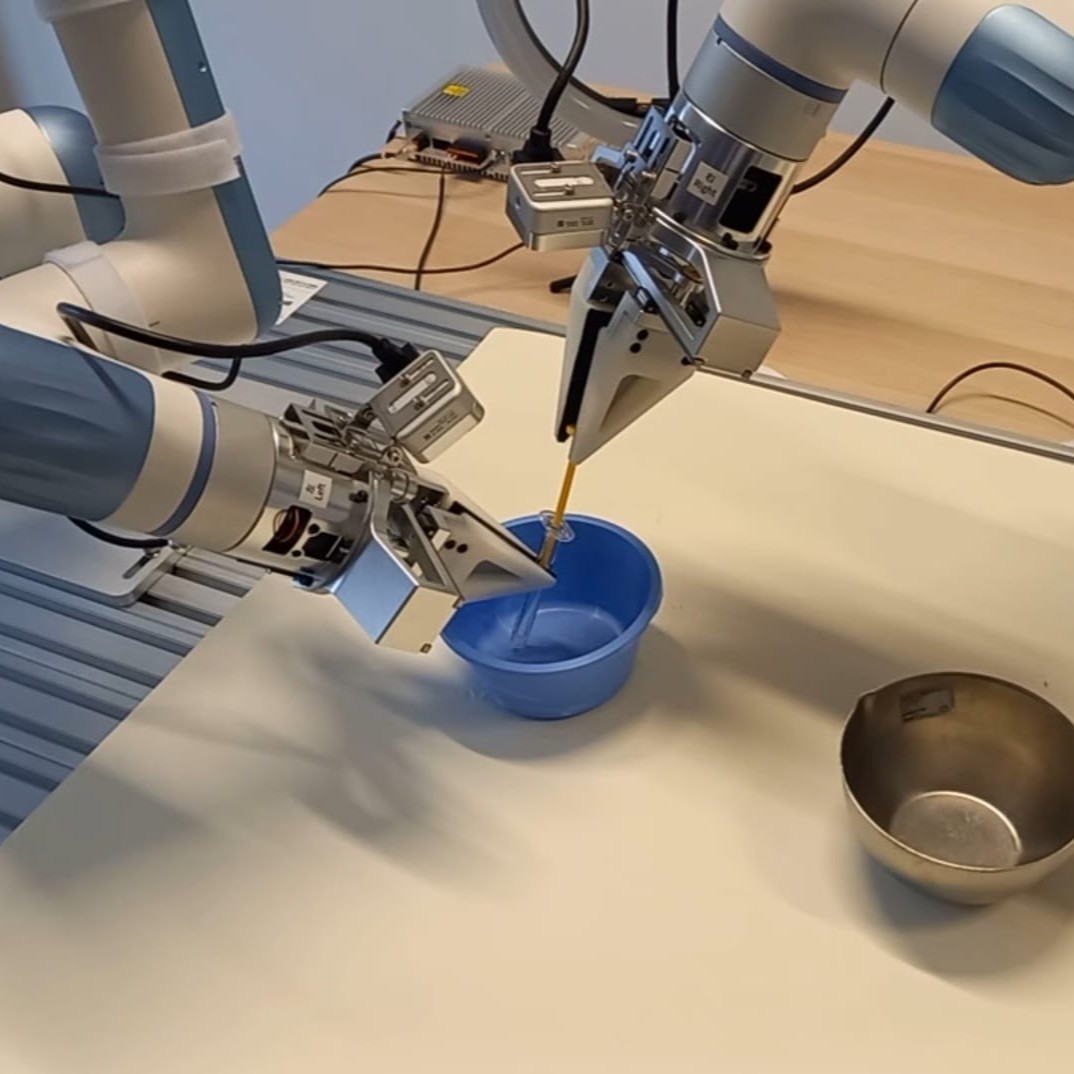
Deployed the ALOHA ACT (Action Chunking with Transformers) policy and conducted a deep analysis of its execution capabilities, revealing critical limitations in how current models handle variance.
Spatial Generalization: Success rates drop drastically when the initial pose of the object varies from the training data.
Environmental Sensitivity: The policy struggles to adapt to changing lighting conditions, shadows, and camera resolutions.
Metric Deficiencies: Highlighted that simply measuring "success rate" fails to capture how strictly the model mimics the demonstrated trajectory without contextual task understanding.